
SRIの75年間のイノベーションについて:MOTOBOT 世界初の自律走行が可能なヒト型の自動二輪ライディングロボット

「75年間のイノベーション」シリーズでは、SRIが設立された1946年から現在に至るまでの数々の画期的なイノベーションを取り上げます。SRIの英語ブログでは、2021年11月の75周年を迎える日まで、毎週1つずつイノベーションに関する記事をリリースしていきます。この日本語ブログでは、その中からいくつかを日本語にてご紹介します。
見た目は人間、ライディングも人間、でも人ではない?それがMOTOBOTです!
「私はMOTOBOT。あなたを超えるために生まれてきた。」ーMOTOBOT、ヤマハ発動機「Racing the Clock」2017年 挑戦の物語ー
バイクに乗ることは素晴らしい経験です。風に乗っているように感じ、マシンと一体となることを体感する事ができます。しかし、バイクは高速かつ荒々しい乗り物であり、そして危険なものでもあります。世界保健機関(WHO)が2018年に発行した世界の交通事故に関する報告書では、事故の28%に原動機付きの二輪車もしくは三輪車が関わっていることがわかりました。
バイクに乗ったことのある人は誰でも、それがいかにスリリングな乗り物であるかを体感しています。一方で、すべての人に対する確かな安全と防護の装備が求められます。ヤマハ発動機株式会社から、さらに安全なライディングを開発してほしいと依頼があり、SRIは全力でこの案件に取り組みました。ヤマハの技術者と一緒に、世界初となる自律走行が可能なヒト型の自動二輪ライディングロボット「MOTOBOT」を開発したのです。
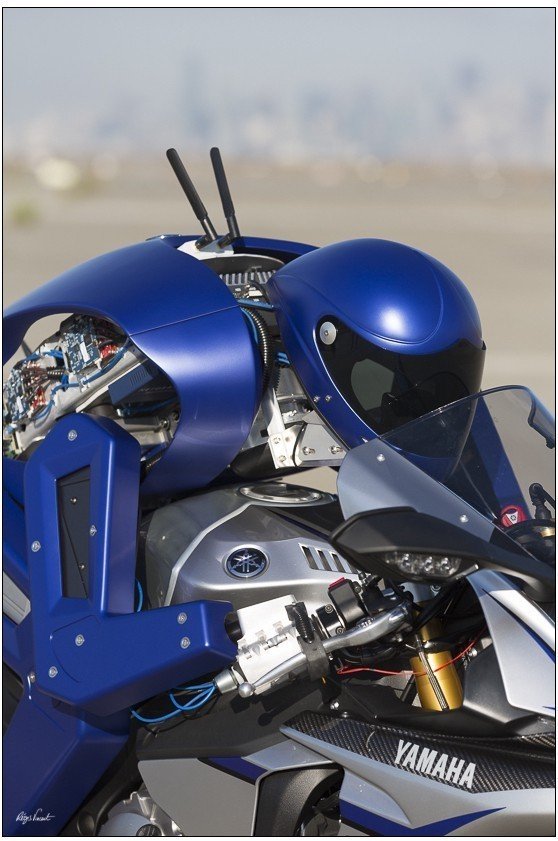
MOTOBOTは純正のヤマハのバイク「YZF-R1M」を乗りこなし、遠目には人間のライダーと区別がつきません。より安全に、そしてより楽しくバイクに乗れるように、MOTOBOTがどのように人間の世界に登場したかをご紹介しましょう。
MOTOBOTがバイクをあやつる
ヤマハのYZF-R1Mは「スーパーバイク」として知られ、高速走行が可能な二輪車です。最高速度は時速183マイル(約295km)にもなり、プロが乗るレース用バイクとして、またバイク愛好家たちのトップクラスのモデルとして使用されています。
高速走行ができるバイクは、ライダーの安全を担保し、設計を完璧に近づけるために厳格なテストをクリアしなければなりません。しかし、人間のライダーが高速のバイク走行テストをすることにはリスクが伴います。Yamaha Motor Venturesはバイクのテスト環境に対応できる、スマートな「クラッシュテスト用ダミー」を必要としていました。設計の目標は、「人間のようなライダーを作ること」と「人間のように運転できるライディングロボットを生み出すこと」であり、純正のヤマハYZF-R1Mを使用した走行テストの環境下で、人間のライダーの走行を再現することでした。このロボットが完成すれば、今後の設計と安全に寄与することになります。また、各テストの結果からバイクのパフォーマンスを改善できるような最適化データを得ることができれば、レースバイクのサーキット最速ラップタイムの更新にもつながります。
世界初のヒト型自律二輪ライディングロボットであるMOTOBOTは、このようにヤマハとSRI Internationalのチームが協力をして生まれたのです。
テクノロジーの歴史におけるMOTOBOTの位置
MOTOBOTは実に、とてもスマートです。人間のライダーの多種多様な動きや条件を聡明に再現することができます。バイクに乗るということには多くの事象が関わりますが、MOTOBOTは常に変化する様々な要因に対して即座に反応できるのです。MOTOBOTを生み出すにあたって、ヤマハとSRI Internationalはこの課題を二つの分野に分けました。
ヤマハ: 車両力学の分析に使用する、高速でのバイク走行に関するアルゴリズムを設計しました。これはエレクトロニクスの信頼性設計にも活かされました。
SRI: SRIはヤマハの要件に応えるために不可欠であった、MOTOBOT開発に必要なロボティクスの専門知識を備えていました。また、サーキットのコース上を走るために必要となる高精度の位置認識システムも開発しました。
SRIとヤマハは、段階を踏んでMOTOBOTを完璧に近づけました。バージョン1はプロトタイプに近いもので、アルミのシェルを採用したことからデザイン上の制限がありました。バージョン2ではこれを改善し、ボディには更に軽量のカーボンファイバーを使用したことから、MOTOBOT内側のスペースが広くなり内部レイアウトを改良することができました。MOTOBOTはステアリング、スロットル、前輪ブレーキ、後輪ブレーキ、クラッチ、ギアシフトを操作するためのアクチュエーターを6個備えています。
新しい設計では、モーターのコントローラーをアクチュエーターにより近い位置に装着できたので、ノイズが軽減してパフォーマンスが向上しました。MOTOBOT 2は、さらに高速かつ正確に走れるよう設計されました。実際の走行の条件下で運転できるようになるには、MOTOBOTはサーキットのコースを正確に走るだけでなく、高速時に様々な判断を下す必要がありました。MOTOBOTがコース上で「正しい道」を進むためには、機械学習、高精度のGPSやセンサーなどすべての要素がその役目を果たしているのです。
MOTOBOTは、ロボティクスと自動運転技術の革命の一環です。MOTOBOTがより精細になること、そして機械学習をこれまで以上に活用することによって得られる知識は、間違いなく今後の自動運転の乗り物の設計に知見を与えることでしょう。

ヒト型自律二輪ライディングロボットはバイク走行をいかに安全にするのか
MOTOBOTチームの当初の目的の一つが、Moto GP 世界選手権チャンピオンの実績があるバレンティーノ・ロッシ選手に勝てるような自律走行ロボットを作ることでした。ロッシに勝つということは、MOTOBOTが人間のライダー、最上級の人間のライダーでさえも真に再現できたということの証明です。2017年にMOTOBOTはロッシに挑戦しましたが、僅差のラップタイムで敗れました。しかし、MOTOBOTには学習する能力が備わっています。MOTOBOTは人間と同じように、失敗から学ぶのです。MOTOBOTは今後もその走りを改善し、最適なポイントでターンをして、最適なコースをとり、より安全なバイクの設計への道へと進んでいくのです。
SRI Internationalのロボティクス部門のアソシエート・ディレクターであるトーマス・P・ロウ(Thomas P. Low)は、MOTOBOTの発表の際に次のように述べています。
「我々は、ヒト型ロボットの性能やパフォーマンスがどこまで進化しているのか、そしてヤマハ発動機株式会社のようなこの業界の先駆者がビジネス上の課題を解決するにあたり、いかにロボティクスを活用できるのか、そして競争上の優位性を確保してイノベーションを加速させることができるのかを実証します。」
MOTOBOTの次の使命は、ロッシのラップタイムに追いつくとともに、バイク走行をより安全に、そしてよりエキサイティングにすることです。
SRIで発信する様々な情報は、こちら(https://www.sri.com/ja/)でご覧いただけます。
出典など
世界保健機関(WHO)世界の交通安全に関する報告2018年版:https://www.who.int/violence_injury_prevention/road_safety_status/2018/GSRRS2018_Summary_EN.pdf
MOTOBOTの走行動画:
https://global.yamaha-motor.com/showroom/motobot/
動画 The Story Behind the MOTOBOT Project(MOTOBOTプロジェクトの歩み):
https://www.youtube.com/watch?v=YSf5xBY-AoM
SRIのロボティクス
https://www.sri.com/robotics-sensors-devices/
プレスリリース:ヤマハ発動機とSRI International、ヒト型自律二輪ライディングロボット「MOTOBOT」の共同開発を行うとCES 2016で発表
https://www.prnewswire.com/news-releases/yamaha-motor-and-sri-international-announce-collaboration-on-the-development-of-a-motorcycle-riding-humanoid-robot-motobot-at-ces-2016-300200752.html
編集/管理:熊谷 訓果/ SRIインターナショナル日本支社
#Robotics #AutonomousVehicles #Motorcycle #75YearsofInnovation