
SRIの75年間のイノベーションについて:ロボットのシェーキー(Shakey the Robot) 〜ルンバなどに繋がる技術の道筋を切り開いたロボットのシェーキー〜

「75年間のイノベーション」シリーズでは、SRIが設立された1946年から現在に至るまでの数々の画期的なイノベーションを取り上げます。SRIの英語ブログでは、2021年11月の75周年を迎える日まで、毎週1つずつイノベーションに関する記事をリリースしています。この日本語ブログでは、その中からいくつかを日本語にてご紹介します。
ロボットの「シェーキー」が来た、見た、人工知能(AI)を揺るがした
私の部屋にあるロボット掃除機「ルンバ」は今日、室内を走行してマッピングした後、一人でカーペットを掃除して回っていました。
そして、Siriに天気予報を聞いて今夜の外出時に着る服を決めました。
イベント会場に向かう車の中では、モバイルGPSマッピングシステムが目的地まで案内してくれました。
私が次に所有するのは自動運転の車かもしれません…
私たちが日常生活で行っている基本的なことを、人工知能(AI)やロボット工学が補強してくれる機会が増えています。
このテクノロジーの多くは、SRIインターナショナルが開発して「ロボットのシェーキー(Shakey the Robot)」と名付けた特別なロボットに端を発しています。
シェーキーは、コンピューター歴史博物館(Computer History Museum)の歴史学者であるジョン・マーコフ(John Markoff)により「自動運転車や軍事用ドローンの曽祖父」と名付けられており、1960年代に初めて構想されたときは確かに世界を震撼させました。今回はそのシェーキーの物語をご紹介します。

シェーキーとシェーキー・プロジェクト創始者のチャールズ・ローゼン(Charles Rosen)
1960年代にAIの世界を揺るがした「swingingとshaking)
「ロボットのシェーキー」を支えるアーキテクチャとアルゴリズムは、世界中のAI対応ロボットシステムのモデルとなりました。これだけでも大きな出来事ですが、世界を変えることになった他の発明の中でもシェーキーが特別な位置付けにある理由は、シェーキーの多くの特徴にあります。では、シェーキーの何が特別だったのでしょうか?
シェーキーには「イノベーション」が凝縮されています。シェーキーが成功し、模範となる地位を獲得するにあたり鍵となったのは、複数種類の人工知能(AI)を1つのシステムに統合したことでした。この「AIのエコシステム」こそがシェーキーを当時から特別な存在としたことであり、現在におけるAIの応用においても特別な存在であり続けています。
シェーキーのコンポーネントを構成するAIエコシステムは、以下のようなものです。
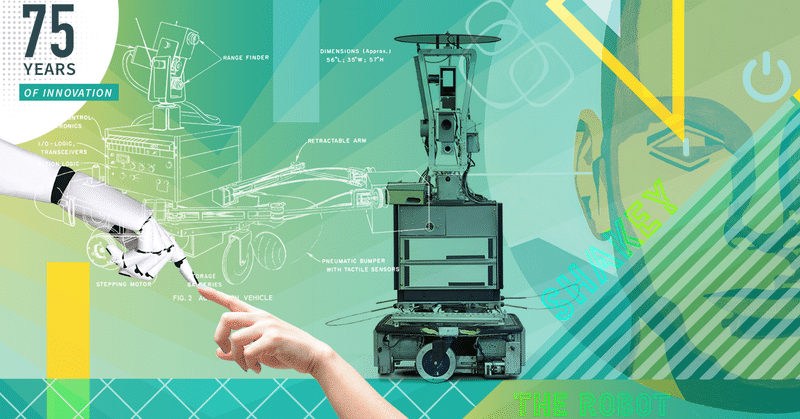
• テレビカメラと光学式距離計(環境を観察するシェーキーのコンピュータービジョン)
• アンテナ無線リンク(シェーキーが基地に戻る通信システム、別名:制御コンピューター)
• 突起物検出器(シェーキーのナビゲーションシステムの一部)
• 物を動かすためのプッシュバー
シェーキーはこのようなテクノロジーコンポーネントのエコシステムを利用して、以下のようなことができるようになりました。
• 7つの部屋の中から特定の場所を探す
• 指定された箱を探し、指示に従ってグループに固めてまとめる
• 障害物を避ける
シェーキーのテクノロジー
シェーキーの技術における大きな進歩には、そのソフトウェアアーキテクチャが貢献しています。シェーキーの制御ソフトウェアは4層のレイヤー構造になっています。このレイヤー構造はロボットに初めて採用されたもので、後世のロボットのモデルとなりました。

また、シェーキーを新たな高みへと導いたのは、コンピュータービジョンと高度なナビゲーション手法、そしてプランニングソフトウェアのエコシステムでした。
あらかじめプログラムされたソフトウェアをベースとし、誤差を調整したAIプログラミングと、ナビゲーションやビジョン(画像)解析を組み合わせることで、シェーキーには環境を理解してモデル化する能力が備わりました。当時としては画期的なことに、このモデルはシェーキー自身とエンドユーザーの双方がアップデートすることができたのです。
この機能を支えていたのが、スタンフォード研究所(Stanford Research Institute、現在のSRI)の「Strips」と呼ばれる問題解決AIプログラム(Stanford Research Institute Problem Solver)です。Stripsではプログラマーがオブジェクト、アクション、前提条件、効果を組み合わせた「理論式(well-formed formulas:wffs)」を使って、「世界モデル」を記述することができました。この方法を用いて初期状態を設定し、ゴール(関連するアクションに基づくサブゴールを含む)を作成します。このモデルは、「前提条件」と「結果」の行動様式に基づいており、最初は「ドアの近く」から移動を始めて、最終的に隣の部屋に達するのです。
震撼する技術(shakey tech)でも、揺らがない未来(Not so shakey)
シェーキーは斬新で画期的なものでした。そして、多くの未来技術を生み出す元となりました。最初の「シェーキーの息子」は、ファジー理論を採用した「ゴール到達」のために行動するロボットの「フレーキー(Flakey)」です。そして、「シェーキーの孫」にあたるのが、100台のロボットが互いに協力して地図作成をする自律型群ロボットプロジェクト「スウォーム・ボット(swarm-bots)」なのです。
シェーキーのテクノロジーをベースにした様々なシステムが開発されています。
• 「Siri」のような自然言語によるインタラクション
• シェーキーのコンピュータービジョンのアイデアは、ドライバーが走行中の車線からはみ出さないように支援することへ繋がりました
• 携帯電話や衛星ナビゲーションシステムの道案内には、シェーキーのために設計されたA*ナビゲーション・アルゴリズムが採用されています
• NASAの火星探査機ローバーにもShakeyTech(シェーキーのテクノロジー)が採用されています。(ローバーの自律ナビゲーション)
ありがとう、シェーキー

2017年2月、シェーキーは51歳の中年ロボットになりましたが、その技術的な功績が認められ、権威ある「第174回IEEEマイルストーン(174th IEEE Milestone for technical achievements)」を受賞しました。カリフォルニア州サンノゼにあるコンピューター歴史博物館には、その盾が誇り高く展示されています。1901年のマルコーニによる大西洋横断無線の受信など世界を変えた技術に贈られてきた同じ名誉を、シェーキーは誇らしげに受け取ったのです。
歩行が安定していない、揺れることが名付けの由来となったシェーキーですが、世界を震撼”shake”させた理由はまったく異なるものでした。シェーキーは、現在も世界中のAI研究者の模範として、誇り高く力強く存在しています。シェーキーは過去のものかもしれませんが、AIの世界にとっては間違いなくエキサイティングな未来へ繋がっています。
シェーキーに敬意を!
ビル・ゲイツ氏はSVAスピーカーシリーズの対談で、若かりし日に「シェーキー」のAIから影響を受けたことについて語っています。
「ソフトウェアの聖杯は人工知能(AI)であり、それは純粋なソフトウェア機能もしくは物理的なロボット機能に宿ります。60年代にさかのぼると、スタンフォード研究所(Stanford Research Institute、現SRI)に「シェーキー」というロボットがありました。私は高校1年生のときにそれを見て、「このロボットをもっと良くするために働こう」と言ったことを覚えています。」
“The holy grail of software is Artificial Intelligence, either in a pure software capability or in a physical robotic capability. Going back to the 60s, the Stanford Research Institute (SRI) had their robot, Shakey. I remember seeing that when I was in 10th grade and saying, “That’s what I want to work on — making that robot a lot better.”
SRI Internationalについて、詳しくはhttps://www.sri.com/jaをご覧ください。
参考資料:
Shakey’s IEEE Milestone page: https://ethw.org/Milestones:SHAKEY:_The_World%E2%80%99s_First_Mobile_Intelligent_Robot,_1972
List of IEEE Milestones: https://ethw.org/Milestones:List_of_Milestones
Fikes, R. E., and N. J, Nilsson, “STRIPS: A New Approach to the Application of Theorem Proving to Problem Solving”, Artificial Intelligence 2 (1971) pp 189–208. (STRIPS): http://ai.stanford.edu/users/nilsson/OnlinePubs-Nils/PublishedPapers/strips.pdf
編集/管理:熊谷 訓果/ SRIインターナショナル日本支社